Line Following Robot
Scope
This project was a team project for school. We were told to construct a robot that would follow attempt to solve a maze by following a black line. The robot had to be autonomous, meaning we couldn’t control the robot with a controller. The robot would be free roaming, fit in a 6in. x 6in. square, follow black lines on a white
background, and solve a maze. For the Maze, the black lines would act as the center line of the “corridor” where the width of the black line would range from 1/4 – 3/4 inches. The maze would contain straight lines, 90 degree turns/intersections, dead ends, loops, and would not have any obstacles. The maze would also not be greater than 10ft x 10ft.
Theory of Operation
The main theory of operation would be the logic for solving the maze. We choose to modify the left-hand rule of a typical maze solving robot by changing the priority of turns. Our priority would be: Left, Right, Straight. What this means is that our robot would take a left if it could. If it could not turn left, then it would try and turn right. If it could not turn right then it would go straight. We were not very familiar with maze solving techniques and we wanted to see what the outcome would be by doing something out of the norm.
All of the programming was done in C. Our logic was stored on the microprocessor which executed our maze solving loop. We tried adding some “bells and whistles” to our robot with LEDs.
These LEDs were more for visually debugging so we could determine what the robot was trying to do.
All of our turns would be reliant on sensors and not time. Whenever our robot would come up to an intersection, the robot would see what the intersection looked like using Infrared LED sensors. Once the robot knew what the intersection looked like, it would attempt it’s turn with the guide of the sensors so it would not overshoot the turn. Once the middle sensor lined up, it would proceed to solving the maze. To get a better idea of the sensor layout, here is a rough sketch of the bottom of the robot.
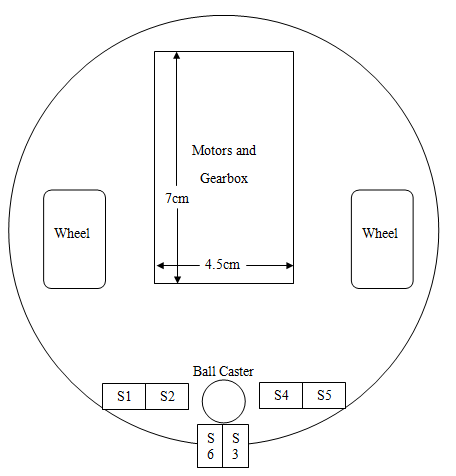
The two sensors in the middle, sensors 3 and 6, are very important. These two sensors make it possible or the robot to center itself on the line at all times. The sensors on the side help determine the type of intersection it has encountered.
To drive the robot around, we powered a motor with a separate power supply, used an H-Bridge, and PWM
through our microprocessor. There was a need for a separate motor to have sufficient power to the motor
at all times. Our original power supply of 5v was not sufficient to power both the circuit and the motors.
Conclusion
Had we chosen the standard maze solving technique, our robot would have solved the maze easily. Unfortunately,
we did not foresee a loop in the shape of a T
Our robot found it’s way to this loop and could not get out. We blame it on some of the lines not being perfectly straight, but it really boils down to our algorithm of “Left Right Straight”. Out of all of the other other teams, our robot was the best at staying on the line even if it wasn’t perfectly straight.
If we were to re-program the robot to use the Left Straight Right rule, I believe we would solve the maze. I unfortunately do not have an electronic copy of the maze and cannot show how it looked.
If you would like more details such as the Bill of Material or code, please feel free to contact me and request it!
Hopefully in the near future I will have time to upgrade the robot and include a better algorithm as
well as memory so it can try remember the last maze it solved.